O Curiosity Rover da NASA, parte da missão do Mars Science Laboratory, pousou em Marte em 6 de agosto de 2012. Sua missão principal é explorar a cratera Gale em Marte para investigar o clima e a geologia do planeta e determinar se ele já ofereceu condições ambientais favoráveis. para a vida microbiana. Crédito: NASA
NASAA curiosidade Marte As atividades científicas planejadas do rover foram adaptadas devido a um espaço de trabalho mundano e limitações de posição, permitindo a análise antecipada de dados e a continuação de observações científicas significativas.
Data de planejamento da terra: quarta-feira, 22 de maio de 2024
Um dos maiores desafios que surge ao operar um rover em outro planeta é que nem sempre sabemos exatamente o que teremos à nossa frente quando estacionarmos depois de dirigir. As equipes científicas e nossos planejadores de rover (que realmente planejam as viagens) fazem o melhor que temos disponível, consistindo em uma combinação de imagens de alta resolução da câmera HiRISE a bordo do Mars Reconnaissance Orbiter e imagens do Curiosity olhando em nosso direção de condução planejada.
No final das contas, porém, não sabemos com o que estaremos lidando em qualquer dia de planejamento até que realmente cheguemos lá. Às vezes, isso ocorre porque a unidade “falha” e termina mais cedo, algo que acontece ao dirigir em terreno rochoso ou arenoso e que faz com que os sistemas de mobilidade do rover excedam seus limites máximos permitidos. Não foi o caso hoje, pois a viagem de 30 metros em direcção à travessia do canal Gediz Vallis que planeámos na segunda-feira foi executada na perfeição. Em vez disso, o nosso “espaço de trabalho” (a área em frente ao rover que pode ser alcançada pelo braço) não era tão excitante como havíamos previsto, consistindo maioritariamente de areia e rochas mais pequenas.

Esta imagem foi tirada pela Câmera de Navegação Esquerda a bordo do Mars Rover Curiosity da NASA no Sol 4192 (22/05/2024 06:36:49 UTC). Crédito: NASA/JPL-Caltech
Adaptando o Plano Missionário
Consequentemente, foi decidido converter hoje um plano de “ciência de contato”, onde desenrolamos o braço no primeiro sol para uma longa lista de atividades antes de partir no segundo sol, para um plano de “toque e vá”, onde nos concentramos principalmente em sensoriamento remoto e uma lista mais limitada de atividades de ciência de contato (o “toque”) e partir no primeiro sol (o “ir”). Do lado da ciência ambiental, esses tipos de grandes reorganizações de planos podem ser um pouco estressantes, pois muitas vezes envolvem muitas alterações de última hora em nossas atividades pré-planejadas, mas felizmente a transição de hoje foi bastante simples.
A decisão de converter o plano acabou sendo uma boa decisão de qualquer maneira, pois estacionamos com a roda dianteira esquerda em cima de uma pilha de pequenas pedras (veja imagem abaixo), o que limitou os tipos de atividades com os braços que poderíamos realizar com segurança, independentemente de como interessante era o espaço de trabalho. Mover a unidade do segundo para o primeiro sol também significa que seremos capazes de obter dados mais úteis da Terra antes que o planejamento para o fim de semana prolongado comece na sexta-feira.
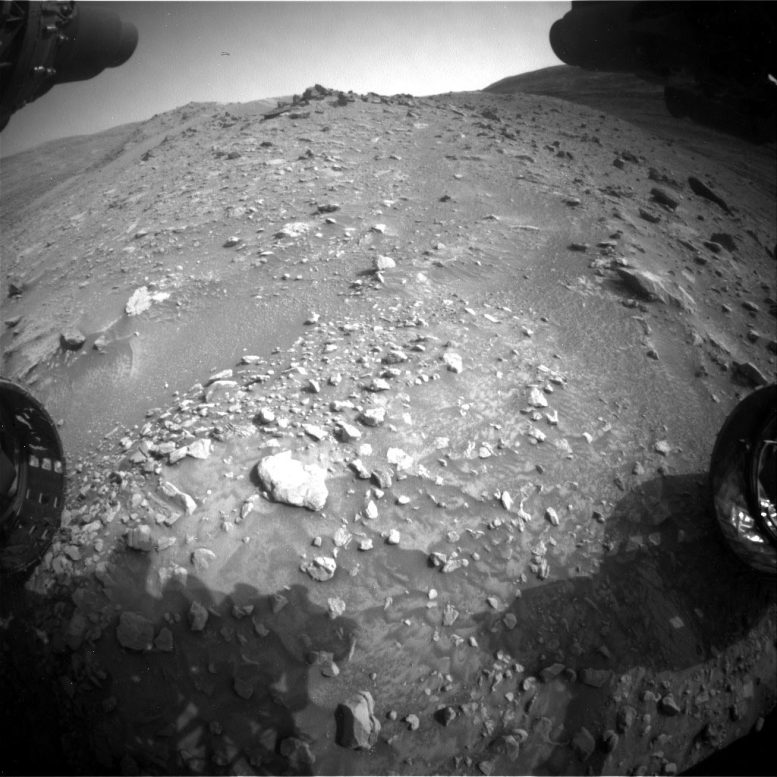
Esta imagem foi tirada pela Front Hazard Prevention Camera (Front Hazcam) a bordo do Mars rover Curiosity da NASA no Sol 4191 (2024-05-21 10:44:55 UTC). Crédito: NASA/JPL-Caltech
Atividades Científicas e Planejamento Futuro
Apesar do espaço de trabalho menos interessante (e deixando de lado o fato de que chamar qualquer parte da superfície de outro planeta de “menos interessante” parece um pouco louco), ainda estamos inserindo uma quantidade razoável de ciência neste plano. O primeiro sol começa com nosso sensoriamento remoto, começando com ChemCam LIBS no “Lago Catherine” e dois mosaicos ChemCam RMI, um no monte Kukenán que preenche nossa visão oriental há muitos meses e outro em “Echo Ridge”, um recurso perto do veículo espacial para o qual estamos dirigindo na esperança de compreender sua origem. O Mastcam então documenta o alvo LIBS e tira algumas imagens de “Lago Evelyn” e “Lago Emerson”, duas das rochas um pouco maiores que ficam fora do espaço de trabalho atual.
Encerramos esta sessão de sensoriamento remoto com um pouco de ciência ambiental, incluindo um Mastcam tau para monitorar a quantidade de poeira na atmosfera, um filme de redemoinho de poeira e monitoramento Navcam da poeira e areia no convés do rover. Antes de dirigirmos, desenrolamos brevemente o braço para fazer algumas observações MAHLI do Lago Catherine. O Curiosity termina seu primeiro sol neste plano partindo, seguido por nosso conjunto padrão de imagens pós-drive para nos ajudar no planejamento na sexta-feira, incluindo outro mosaico de monitoramento do deck Navcam para ver se o drive se moveu em torno de alguma areia e poeira.
Como estaremos em um novo local, o segundo sol deste plano é todo sensoriamento remoto não direcionado. A ChemCam usará o AEGIS para procurar autonomamente um alvo LIBS em nosso novo local, depois faremos uma série de pequenos filmes Navcam para procurar redemoinhos de poeira ao redor do rover e um mosaico de linha de visão Navcam 3×1 para determinar o quantidade de poeira atualmente na atmosfera dentro de Gale. Pouco depois do meio-dia, o Curiosity encerrará o dia (ou sol, na verdade) e voltará a dormir para o resto do plano, acordando ocasionalmente para telefonar para casa com os dados que coletou. Como sempre, a DAN, a REMS e a RAD continuam a trabalhar arduamente em segundo plano, especialmente a RAD, dada a alta atividade solar que foi visto recentemente.
Escrito por Conor Hayes, estudante de graduação da Universidade de York
