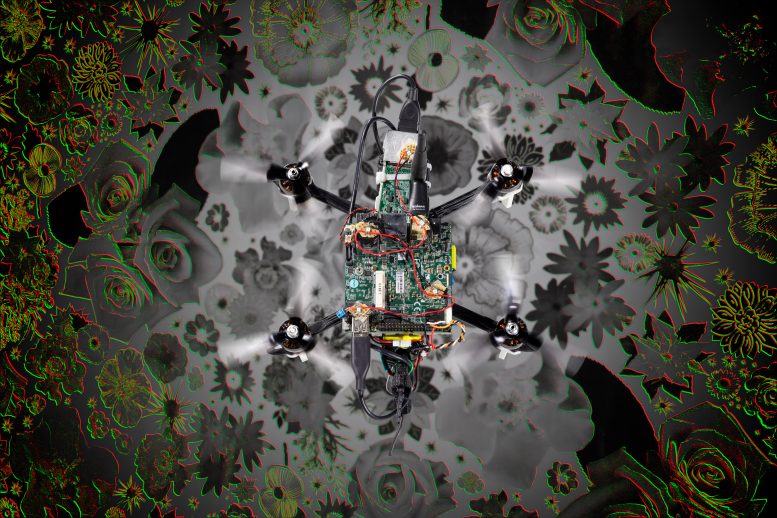
Foto do “drone neuromórfico” voando sobre um padrão de flor. Ele ilustra as entradas visuais que o drone recebe da câmera neuromórfica nos cantos. Vermelho indica pixels ficando mais escuros, verde indica pixels ficando mais brilhantes. Crédito: Guido de Croon
O primeiro sistema neuromórfico de visão e controle foi implementado em um drone voador.
Pesquisadores da Universidade de Tecnologia de Delft criaram um drone que pode voar de forma autônoma, utilizando processamento e controle de imagens neuromórficas inspirados no funcionamento do cérebro de animais. Os cérebros dos animais processam dados e consomem energia com mais eficiência do que as redes neurais profundas normalmente operadas em GPUs. Consequentemente, os processadores neuromórficos são ideais para drones pequenos, pois eliminam a necessidade de hardware volumoso e baterias grandes.
Os resultados são extraordinários: durante o voo, a rede neural profunda do drone processa dados até 64 vezes mais rápido e consome três vezes menos energia do que quando executado em uma GPU. Desenvolvimentos adicionais desta tecnologia podem permitir que os drones se tornem tão pequenos, ágeis e inteligentes como insetos voadores ou pássaros. As descobertas foram publicadas recentemente em Robótica Científica.
Aprendendo com cérebros de animais: aumentando as redes neurais
A inteligência artificial tem um grande potencial para fornecer aos robôs autônomos a inteligência necessária para aplicações no mundo real. No entanto, a IA atual depende de redes neurais profundas que requerem um poder computacional substancial. Os processadores feitos para rodar redes neurais profundas (Unidades de Processamento Gráfico, GPUs) consomem uma quantidade substancial de energia. Especialmente para pequenos robôs como drones voadores, isto é um problema, uma vez que só podem transportar recursos muito limitados em termos de detecção e computação.
Os cérebros dos animais processam informações de uma forma muito diferente das redes neurais executadas em GPUs. Os neurônios biológicos processam informações de forma assíncrona e se comunicam principalmente por meio de pulsos elétricos chamados espigões. Como o envio de tais picos custa energia, o cérebro minimiza os picos, levando a um processamento esparso.
Timelapse de drone voador com IA neuromórfica totalmente equipada com visão para controle e tecnologia Liohi. Crédito: Guido de Croon
Inspirados por estas propriedades dos cérebros animais, cientistas e empresas de tecnologia estão desenvolvendo novos, neuromórfico processadores. Esses novos processadores permitem executar redes neurais com picos e prometem ser muito mais rápidos e com maior eficiência energética.
“Os cálculos realizados por redes neurais de pico são muito mais simples do que aqueles em redes neurais profundas padrão”, diz Jesse Hagenaars, candidato a doutorado e um dos autores do artigo, “Enquanto os neurônios de pico digital só precisam adicionar números inteiros, os neurônios padrão precisam multiplique e adicione números de ponto flutuante. Isso torna o aumento das redes neurais mais rápido e mais eficiente em termos de energia. Para entender por quê, pense em como os humanos também acham muito mais fácil calcular 5 + 8 do que calcular 6,25 x 3,45 + 4,05 x 3,45.”
Essa eficiência energética é ainda maior se processadores neuromórficos forem usados em combinação com sensores neuromórficos, como câmeras neuromórficas. Essas câmeras não produzem imagens em um intervalo de tempo fixo. Em vez disso, cada pixel só envia um sinal quando fica mais claro ou mais escuro. As vantagens dessas câmeras são que elas podem perceber o movimento muito mais rapidamente, são mais eficientes em termos de energia e funcionam bem tanto em ambientes escuros quanto claros. Além disso, os sinais das câmeras neuromórficas podem alimentar diretamente redes neurais que funcionam em processadores neuromórficos. Juntos, eles podem formar um grande facilitador para robôs autônomos, especialmente robôs pequenos e ágeis, como drones voadores.
Primeira visão neuromórfica e controle de um drone voador
Em artigo publicado em Robótica Científica, pesquisadores da Universidade de Tecnologia de Delft, na Holanda, demonstram pela primeira vez um drone que usa visão e controle neuromórficos para vôo autônomo. Especificamente, eles desenvolveram uma rede neural que processa os sinais de uma câmera neuromórfica e emite comandos de controle que determinam a pose e o impulso do drone. Eles implantaram essa rede em um processador neuromórfico, o chip de pesquisa neuromórfica Loihi da Intel, a bordo de um drone. Graças à rede, o drone pode perceber e controlar o seu próprio movimento em todas as direções.

Primeiro drone voando com IA neuromórfica totalmente de visão para controle. Crédito: Guido de Croon
“Enfrentamos muitos desafios”, diz Federico Paredes-Vallés, um dos pesquisadores que trabalharam no estudo, “mas o mais difícil foi imaginar como poderíamos treinar uma rede neural com picos para que o treinamento fosse suficientemente rápido e a rede treinada funcionaria bem no robô real. Ao final, projetamos uma rede composta por dois módulos. O primeiro módulo aprende a perceber visualmente o movimento a partir dos sinais de uma câmera neuromórfica em movimento. Ele faz isso por si só, de forma auto-supervisionada, com base apenas nos dados da câmera. Isto é semelhante à forma como os animais aprendem a perceber o mundo por si próprios. O segundo módulo aprende a mapear o movimento estimado para comandos de controle, em um simulador. Esse aprendizado contou com uma evolução artificial na simulação, em que as redes que melhor controlavam o drone tinham maior chance de produzir descendentes. Ao longo das gerações da evolução artificial, as redes neurais com picos tornaram-se cada vez mais boas no controle e finalmente foram capazes de voar em qualquer direção em velocidades diferentes. Treinamos os dois módulos e desenvolvemos uma forma de fundi-los. Ficamos felizes em ver que a rede mesclada funcionou imediatamente bem no robô real.”
Com sua visão e controle neuromórficos, o drone é capaz de voar em diferentes velocidades sob diversas condições de luz, do escuro ao claro. Ele pode até voar com luzes tremeluzentes, o que faz com que os pixels da câmera neuromórfica enviem à rede um grande número de sinais que não estão relacionados ao movimento.
Melhor eficiência energética e velocidade por IA neuromórfica
“É importante ressaltar que nossas medições confirmam o potencial da IA neuromórfica. A rede funciona em média entre 274 e 1.600 vezes por segundo. Se executarmos a mesma rede em uma GPU pequena e incorporada, ela será executada em média apenas 25 vezes por segundo, uma diferença de um fator de aproximadamente 10 a 64! Além disso, ao rodar a rede, o chip de pesquisa neuromórfica Loihi da Intel consome 1.007 watts, dos quais 1 watt é a energia ociosa que o processador gasta apenas ao ligar o chip. Operar a rede em si custa apenas 7 miliwatts. Em comparação, ao executar a mesma rede, a GPU incorporada consome 3 watts, dos quais 1 watts é energia ociosa e 2 watts são gastos para operar a rede. A abordagem neuromórfica resulta em IA que funciona de forma mais rápida e eficiente, permitindo a implantação em robôs autônomos muito menores.”, diz Stein Stroobants, candidato a doutorado na área de drones neuromórficos.
Aplicações futuras de IA neuromórfica para pequenos robôs
“A IA neuromórfica permitirá que todos os robôs autónomos sejam mais inteligentes”, diz Guido de Croon, professor de drones de inspiração biológica, “mas é um facilitador absoluto para pequenos robôs autónomos. Na Faculdade de Engenharia Aeroespacial da Universidade de Tecnologia de Delft, trabalhamos em pequenos drones autônomos que podem ser usados para aplicações que vão desde o monitoramento de colheitas em estufas até o controle de estoques em armazéns. As vantagens dos pequenos drones são que eles são muito seguros e podem navegar em ambientes estreitos, como entre áreas de cultivo de tomates. Além disso, podem ser muito baratos, de modo que podem ser implantados em enxames. Isso é útil para cobrir uma área mais rapidamente, como mostramos nas configurações de exploração e localização de fontes de gás.”
“O trabalho atual é um grande passo nessa direção. No entanto, a realização destas aplicações dependerá de uma maior redução do hardware neuromórfico e da expansão das capacidades para tarefas mais complexas, como a navegação.”
Referência: “Visão e controle totalmente neuromórficos para vôo autônomo de drones” por F. Paredes-Vallés, JJ Hagenaars, J. Dupeyroux, S. Stroobants, Y. Xu e GCHE de Croon, 15 de maio de 2024, Robótica Científica.
DOI: 10.1126/scirobotics.adi0591
