
Os pesquisadores desenvolveram um controlador aprimorado por IA para exoesqueletos que aprende a suportar vários movimentos, como caminhar e correr, sem calibração individual. Este sistema reduz significativamente o gasto energético, tornando-o uma ferramenta promissora para melhorar a mobilidade humana de forma eficiente.
Um novo controlador de IA para exoesqueletos, capaz de aprender diferentes movimentos humanos sem programação específica, demonstrou economias substanciais de energia, marcando um grande avanço na tecnologia de robôs vestíveis.
Imagine movimentos mais seguros e eficientes para trabalhadores de fábricas e astronautas, bem como maior mobilidade para pessoas com deficiência. Algum dia poderá se tornar uma realidade mais difundida, graças a uma nova pesquisa publicada em 12 de junho na revista Natureza.
Chamadas de “exoesqueletos”, estruturas robóticas vestíveis para o corpo humano prometem movimentos mais fáceis, mas os obstáculos tecnológicos limitaram sua aplicação mais ampla, explicou o Dr. Shuzhen Luo, da Embry-Riddle Aeronautical University – primeiro autor do Natureza artigo, com o autor correspondente Dr. Hao Su de Universidade Estadual da Carolina do Norte (Estado NC) e outros colegas.
Até o momento, os exoesqueletos devem ser pré-programados para atividades e indivíduos específicos, com base em testes longos, caros e trabalhosos com seres humanos, observou Luo.
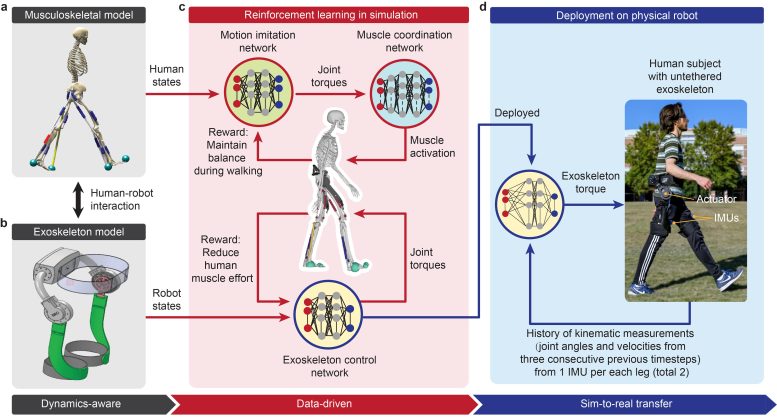
Os pesquisadores desenvolveram um modelo humano musculoesquelético de corpo inteiro composto por 208 músculos (canto superior esquerdo), bem como um exoesqueleto de quadril personalizado (canto inferior esquerdo), e então aproveitaram a inteligência artificial para simular múltiplas atividades (centro) antes de implantar o controlador aprendido em seres humanos. Crédito: NaturezaLuo et al., Figura 2.
Apresentando o controle alimentado por IA
Agora, os pesquisadores descreveram um controlador superinteligente ou “aprendido” que aproveita o uso intensivo de dados inteligência artificial (IA) e simulações de computador para treinar exoesqueletos robóticos portáteis.
“Este novo controlador fornece assistência de torque suave e contínua para caminhar, correr ou subir escadas sem a necessidade de qualquer teste humano”, relatou Luo. “Com apenas uma execução em uma unidade de processamento gráfico, podemos treinar uma lei de controle ou ‘política’, em simulação, para que o controlador possa efetivamente auxiliar todas as três atividades e vários indivíduos.”
Shuzhen Luo, da Embry-Riddle Aeronautical University (à direita), cujo trabalho aparece na “Nature” em 12 de junho de 2024, discute sua pesquisa relacionada a exoesqueletos robóticos alimentados por IA, durante uma apresentação interna de pôster. Crédito: Embry-Riddle/David Massey
Reduções Revolucionárias de Energia
Impulsionado por três redes neurais interconectadas e multicamadas, o controlador aprende à medida que avança – evoluindo através de “milhões de épocas de simulação musculoesquelética para melhorar a mobilidade humana”, explicou o Dr. Luo, professor assistente de Engenharia Mecânica em Daytona Beach, em Embry-Riddle. Flórida, campus.
A estrutura de “aprendizado em simulação”, sem experimentos, implantada em um exoesqueleto de quadril personalizado, gerou o que parece ser a maior redução da taxa metabólica de exoesqueletos de quadril portáteis até o momento – com uma média de 24,3%, 13,1% e 15,4. % reduziu o gasto energético dos usuários, para caminhar, correr e subir escadas, respectivamente.
Essas taxas de redução de energia foram calculadas comparando o desempenho de seres humanos com e sem o exoesqueleto robótico, explicou Su, da NC State. “Isso significa que é uma medida verdadeira de quanta energia o exoesqueleto está economizando”, disse Su, professor associado de Engenharia Mecânica e Aeroespacial. “Este trabalho está essencialmente tornando a ficção científica uma realidade – permitindo que as pessoas queimem menos energia enquanto realizam uma variedade de tarefas.”
Preenchendo a lacuna entre simulação e realidade
Acredita-se que a abordagem seja a primeira a demonstrar a viabilidade do desenvolvimento de controladores, em simulação, que preenchem a chamada simulação-realidade, ou “lacuna sim2real”, ao mesmo tempo que melhoram significativamente o desempenho humano.
“As conquistas anteriores na aprendizagem por reforço tendiam a se concentrar principalmente em simulação e jogos de tabuleiro”, disse Luo, “enquanto propusemos um novo método – ou seja, uma forma de aprendizagem por reforço baseada em dados e com reconhecimento dinâmico para treinar e controlar robôs vestíveis para diretamente beneficiar os humanos.”
A estrutura “pode oferecer uma estratégia generalizável e escalável para a implantação rápida e generalizada de uma variedade de robôs assistivos para indivíduos fisicamente aptos e com mobilidade reduzida”, acrescentou Su.
Superando Obstáculos Tecnológicos
Conforme observado, os exoesqueletos tradicionalmente exigem leis de controle artesanais baseadas em testes humanos demorados para lidar com cada atividade e levar em conta as diferenças nos movimentos individuais, explicaram os pesquisadores na revista “Nature”. Uma abordagem de aprendizagem em simulação sugeriu uma possível solução para esses obstáculos.
A “abordagem de aprendizagem por reforço baseada em dados e consciente da dinâmica” resultante acelera dramaticamente o desenvolvimento de exoesqueletos para adoção no mundo real, disse Luo. A simulação de circuito fechado incorpora o controlador do exoesqueleto e modelos físicos de dinâmica músculo-esquelética, interação humano-robô e reações musculares para gerar dados eficientes e realistas. Desta forma, uma política de controle pode evoluir ou aprender em simulação.
“Nosso método fornece uma base para soluções prontas para uso no desenvolvimento de controladores para robôs vestíveis”, disse Luo.
Direções futuras na pesquisa de exoesqueleto
A investigação futura centrar-se-á em marchas únicas, para caminhar, correr ou subir escadas, para ajudar pessoas com deficiências, como acidente vascular cerebral, osteoartrite e paralisia cerebral, bem como aquelas com amputações.
Para obter mais informações sobre esta pesquisa, consulte Trajes robóticos que usam IA para ajudá-lo a correr com mais facilidade e rapidez.
Referência: “Assistência de exoesqueleto sem experiência via aprendizagem em simulação” por Shuzhen Luo, Menghan Jiang, Sainan Zhang, Junxi Zhu, Shuangyue Yu, Israel Dominguez Silva, Tian Wang, Elliott Rouse, Bolei Zhou, Hyunwoo Yuk, Xianlian Zhou e Hao Su , 12 de junho de 2024, Natureza.
DOI: 10.1038/s41586-024-07382-4
O Natureza o artigo foi de autoria de Shuzhen Luo da Embry-Riddle Aeronautical University, com Menghan Jiang, Sainan Zhang, Junxi Zhu, Shuangyue Yu, Israel Dominguez Silva e Tian Wang da North Carolina State University; e o autor correspondente Hao Su, da Universidade Estadual da Carolina do Norte e da Universidade da Carolina do Norte em Chapel Hill; Elliott Rouse, da Universidade de Michigan, Ann Arbor; Bolei Zhou, da Universidade da Califórnia, Los Angeles; Hyunwoo Yuk, do Instituto Avançado de Ciência e Tecnologia da Coreia; e Xianlian Zhou do Instituto de Tecnologia de Nova Jersey.
Yufeng Kevin Chen, do Instituto de Tecnologia de Massachusetts, forneceu feedback construtivo em apoio ao artigo, “Assistência de exoesqueleto sem experimento por meio de aprendizagem em simulação”.
A pesquisa foi apoiada em parte pelo prêmio CAREER da National Science Foundation (NSF) (CMMI 1944655); o Instituto Nacional de Pesquisa sobre Deficiência, Vida Independente e Reabilitação (DRRP 90DPGE0019); um bolsista ilustre da Switzer Research (SFGE22000372); o Futuro do Trabalho da NSF (2026622); e a Instituto Nacional de Saúde (1R01EB035404).
De acordo com as políticas de publicação da “Nature”, quaisquer potenciais “interesses conflitantes” foram divulgados no artigo. Su e Luo, um ex-pesquisador de pós-doutorado na NC State que agora faz parte do corpo docente da Embry-Riddle, são co-inventores de propriedade intelectual relacionada ao controlador descrito aqui.
